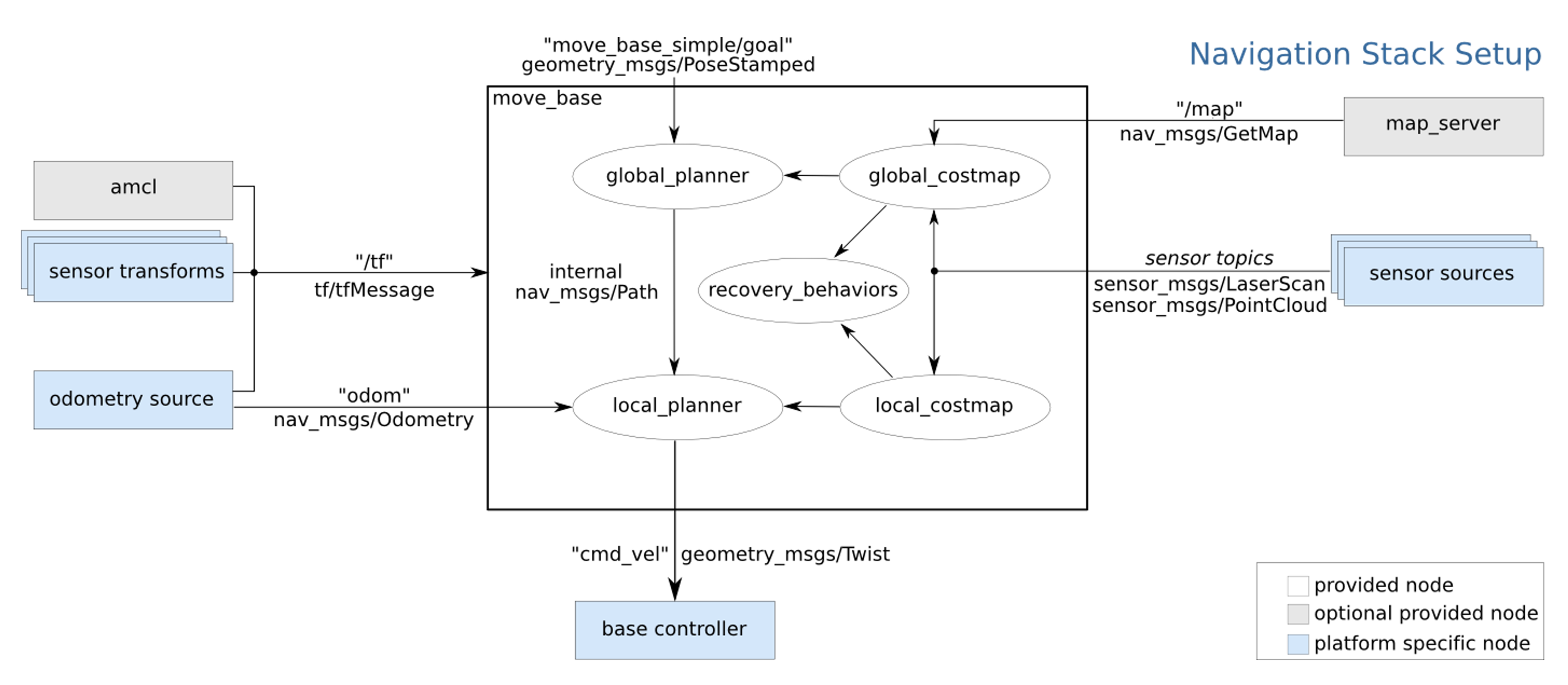
Navigation框架不足分析 Navigation框架在移动机器人中是比较常用的框架,在使用过程中发现框架本身存在了一些问题,包括组件高耦合、单体类职责过多、硬编码状态机、反馈信息贫乏、恢复机制不灵活、接口陈旧等问题,对Navigation框架进行分析和总结。 2026-03-30 robot #导航